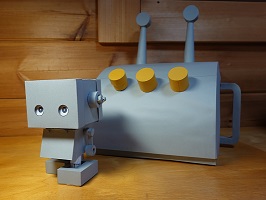
ということでPR−11は、紙のリモコンで起動して二足歩行をする紙ロボットというコンセプトで考え始めました。リモコンと言っても電気的なものを使ったのではMPMのコンセプトから外れてしまうので、何かいい方法がないかと考えあぐねていた時、昔流行っていた空気砲をふと思い出したのでした。段ボールの箱に丸穴をあけ箱の側面をたたくと、丸穴からドーナツ状の空気の渦がかなり遠くまで飛んで行くというあの話です。試しに転がっていたダンボ―ルに穴をあけてたたいてみましたが、そう簡単な話でもなく試行錯誤の末紙を折って蛇腹状のものを作り、それをゴムの張力を利用して一気に圧縮することでそれなりの風力を作り出すことができました。さてロボットのリモコンと言えば、世代的には「鉄人28号」のこの形しか考えられず、オマージュを込めてこの形としました。
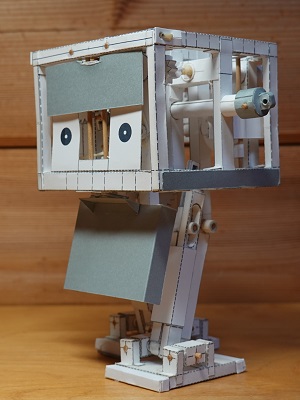
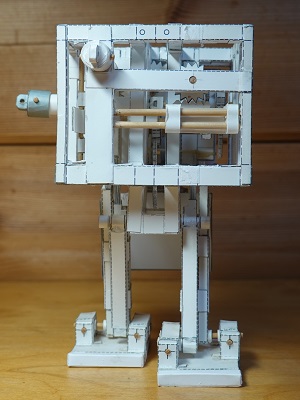
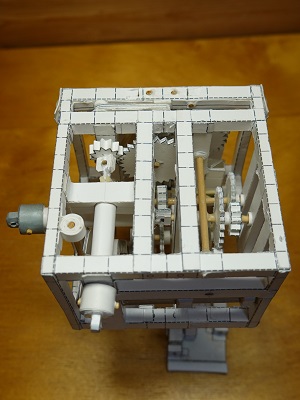
一方ペーパーロボットの方では、当初風力を受けるプレートを設けて、リンクなどを介して歩行のスタートスイッチを動かすように考えていたのですが、それだけでは信号?が伝わったということが解らないと考え、目をあけるという動作を加えることにしました。(起動したロボットが最初に示す動作と言えば、これもまた鉄腕アトムのように目をあける動作しかないわけです。)また歩行を開始するスイッチを直接風力だけで駆動させるのは難しということもあり、このスイッチを駆動させるための動力を別途設けることにし、ギヤによる増力機構も設け、ラック&ピニオンでスイッチを駆動させることにしました。歩行機構はPR-5方式を採用することにし従来の機構を流用しました。これらのこれまでのペーパーロボットからの大幅な変更に伴い、ロボットのデザインも従来のものから大きく変更し、頭部の大きさを優先させる三頭身のデザインとしました。


画像をクリックするとYouTube動画へ移動します