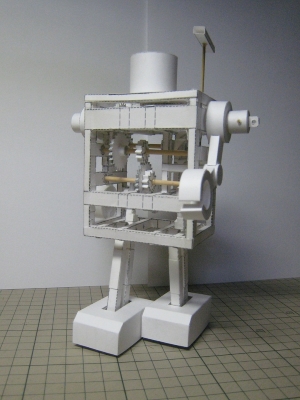
そこでPR−3では、基本の仕様に立ち戻り、メカを必要最小限に単純化し、動力ゴムも割り切って必要最小限の長さに設定することでボディを小型化して負荷を削減しました。負荷を減らし動作が軽快になった分ゴム動力が弱くなっても動作し、歩行数ものびました。
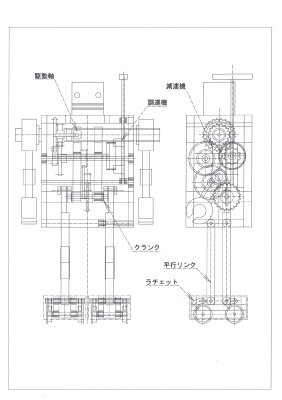
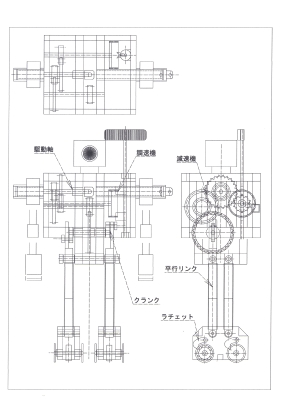
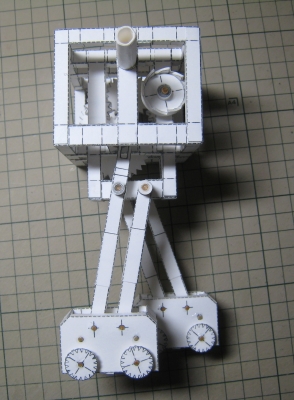
機構的な考え方は、PR−1を踏襲していますが、負荷を低減するため動力ギヤの減速比は維持したまま、ギヤの段数を3段から2段に減らしています。
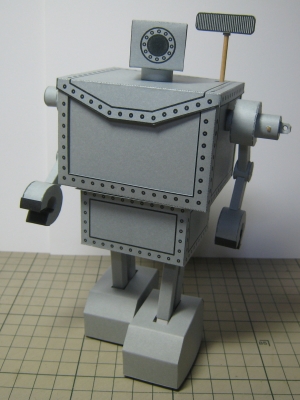
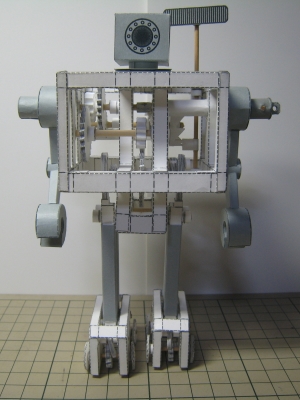
デザイン的には、ブリキのロボットをイメージしてレトロ風にし、頭部は一眼とすることによりロボットの視線を意識してみました。
画像をクリックするとYouTube動画へ移動します

