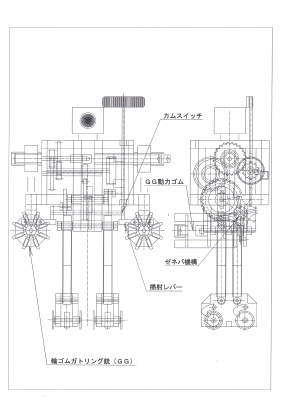
どんな機能にするかということについては、ロボットというと子供の頃からの戦うイメージが頭から離れず、ここ10年ほど前から、私たちが子供の頃よく作って遊んでいた輪ゴム銃が静かな?ブームになっていたことに思い至り、元々ゴム動力で動いているので相性がいいだろうということで輪ゴム銃に決めました。しかしMPM的には普通の輪ゴム銃では面白くないのでガトリング銃とし、銃身を回転させるゴム動力は銃側に内蔵して、その回転は本体側から操作すればそう大きな負荷にはならないだろうという構想です。
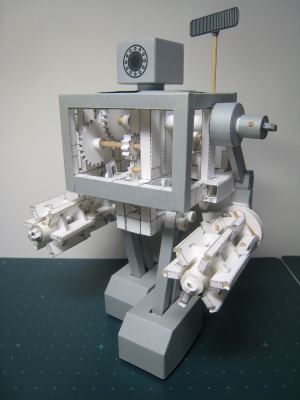
画像をクリックするとYouTube動画へ移動します
