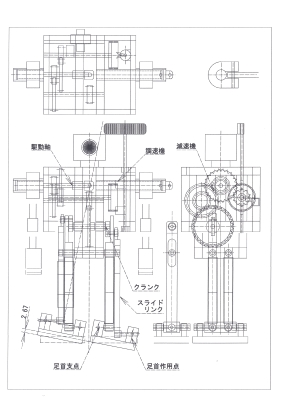
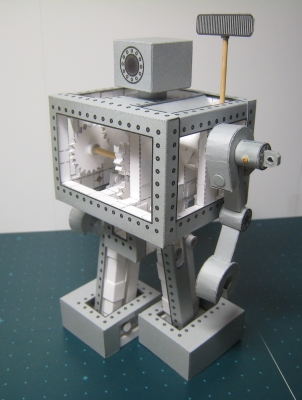
クランク機構に平行リンクで構成した脚部を前後に振る機能に加え、平行リンクと相対的にリンク方向のストローク差を作りだす新たなスライドリンクを設けることにより足首を曲げる機能を追加し、写真のようにクランクの回転に従い脚が前後に振り出されるのと同期して、足首が左右に曲げられます。この動きにより、足首を曲げると接地している足部にロボットの重心が移動して体が傾き、この傾きにより他方の足が持ち上げられ、上がった足を前方に振り出し、また足首が元に戻ることで接地するという動作を繰り返して、静的二足歩行が行われます。
画像をクリックするとYouTube動画へ移動します

製作の全工程と歩行動作の動画です