画像をクリックするとYouTube動画へ移動します
| Paper RobotⅦ | |
| 20013年8月完成 製作期間6カ月 | |
|
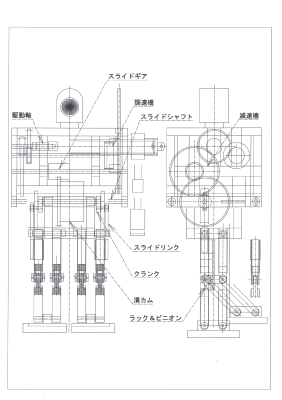
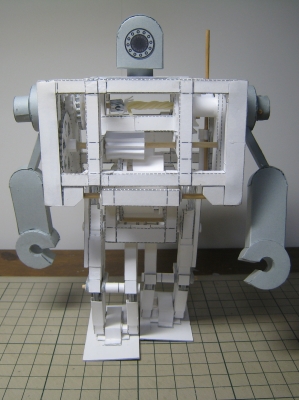
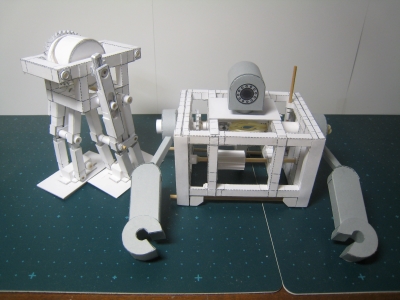
PR-7は、膝付脚によるより自然な(人間的な?)二足歩行となっているのが特徴です。実際は、上下腿を平行リンクとした膝付W平行リンク脚の膝間接部にラック&ピニオンを組み込み、PR-Ⅴで考案したスライドリンクを応用し、直線運動を回転運動に変換して膝関節の曲げ伸ばしを制御しています。また膝を曲げた脚はそのまま前方に振り出し、膝を伸ばしたまま軸足となる他方の脚に重心を移動させるために、クランク軸に設けたドラム状の溝カムを用いてボディ部を左右にスライド移動させています。この為、ボディ内の動力機構と脚部のクランク機構は写真のように全く独立しており、動力の伝達には噛合ったまま回転を伝え軸方向にスライドが可能なスライドギヤを用いています。そしてこれらの大幅に増加した負荷をぶん回す為に、ギヤ比を上げゴムを増強したパワートレインを新規設計しました。 | |
|
|
|
| 図面 | PR-7 |
|
|
|
| PR-7脚部分離 | |
|
画像をクリックするとYouTube動画へ移動します | |
|
| |
|
| |
|
| |