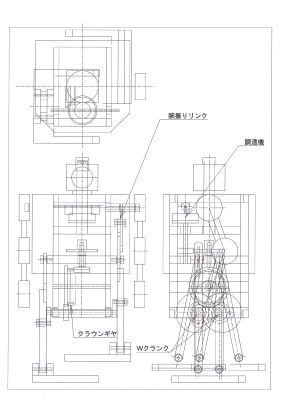
今回は、当初からシンプルにコの字足と決めていたので、腕振りぐらいは してみようとメカをボディの中心に集めるべく、クラウンギアを使い駆動軸の方向を変換して、動力ゴムを垂直に設置しました。またなるべく単純にすべく調速機も省いてと思っていたのですが、減速比をこれまでの数倍にした程度ではとてもまともに歩けず、かと言って減速比を一ケタ上げるのでは適当な大きさにまとまりそうもなく、結局調速機も付けることになってしまったのですが、前記したように動力ゴムを垂直に設置したので、これまでと違い調速軸も垂直という方式になりました。
結局あまりシンプルにもできなかったのですが、クラウンギアを導入して腕振り機構を設置し、新たな調速機も試せたということでとりあえず納得することにしました。
画像をクリックするとYouTube動画へ移動します
