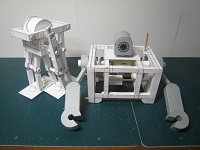
| PR-Ⅶ(ピーアールセブン) 膝付二足歩行ペーパーロボットPR-Ⅶのプロトタイプが一応完成しました。 PR-Ⅶは、膝付脚による二足歩行を行い、PR-Ⅴの独特の二足歩行に比べ より自然な(人間的な?)歩行となっているのが特徴です。 またその歩き方と同様にPR-Ⅴとは全く対照的な設計コンセプトとなってい ます。PR-Ⅴは、ある意味発想の勝利?とでも言えるような、非常にシンプル な機能の組み合わせで二足歩行を実現していますが、PR-Ⅶの方は、論理 的?に一つ一つの機能を積み上げて二足歩行を実現しています。 実際は、上下腿を平行リンクとした膝付W平行リンク脚の膝間接部にラック &ピニオンを組み込み、PR-Ⅴで考えたスライドリンクを応用し、直線運動を 回転運動に変換して膝関節の曲げ伸ばしを制御しています。また膝を曲げた 脚はそのまま前方に振り出し、膝を伸ばしたまま軸足となる他方の脚に重心 を移動するために、ドラム状の溝カムを用いてボディ部をスライド移動させて います。この為、ボディ内の動力機構と脚部のクランク機構は全く独立してお り、動力の伝達には、かみ合ったまま回転を伝え軸方向にスライドが可能な スライドギアを用いています。そしてこれらの大幅に増加した負荷をぶん回す 為に、ギア比を上げゴムを増強したパワートレインを新規設計しました。 このようにPR-Ⅶは、PRシリーズとしても久々のALL新規設計となり ここ数 ヶ月は掛かり切りで結構煮詰まりました。またPR-Ⅴから1年以上たち作ってい る最中は、何とかPR-Ⅴを超えるものをなどとも思っていましたが、今思うと PR-Ⅴは一つのペーパーロボットの完成形だったのかも知れないとも思ってい ます。またPR-Ⅶは、PR-Ⅴの後継機でありながらそれとは違う力技で全く別 の方向性を示せたのではないかと自画自賛している今日この頃です。
まずは、Movie Galleryで歩行の様子をご覧ください。 |
| ||||||
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
歩行動作 |
|
|
|
|
| 画像をクリックするとここからも動画を見ることができます | |||||||
|
| |||||||
| P.S.
さて動画を見ていただいて、その歩行の速さに違和感を覚えた方もいらっしゃ るのではないでしょうか?調速機でスピードをコントロールはしているのですが、 いつもの飾りをかねたレーダーの天符をつけると歩けないのです。軸足が垂直 のときは、静的にもバランスが取れているのですが、その前後では重心移動の 速さと振り出し脚の膝の曲げの関係で静的なバランスが必ずしもとれておらず、 倒れる前に脚を前に出しそれを繰り返して前進している状態なのです。しかし これは動的歩行になっているのではないかとも思っているのですが、いかがで しょうか。なんちゃって動歩行的な? | |||||||
|
| |||||||