の方は昨年8月の頭で完成していたのですが、その後しばらく放心状態で、
時間はあったのですがMPMの方にも気が向かなかったのです。まあその間に
も次に何を作るのかはいろいろ考えており、その結論が今回の新作となった
わけです。
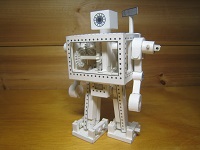
今回のモデルは基本PR-5と同じです。一点だけ違うのが、動力のゴム以外
全て紙でできているということです。これはMPMを始めた当初から動力のゴム
以外、回転軸を含め全てを紙で作りたいという思いがありました。実はかなり
以前、PR-3を作った時点でPR-4として一度試してそれなりの見通しは立っ
ていたのですが、再度作り直すには通常のペーパーロボットの倍以上の時間
が必要で、当時は日々の糧を得るためのお仕事もしなくてはならず、紙にこだ
わって貴重な時間を費やすよりも、私的に面白いこと、新作をやりたいという思
いを優先させることにして、棚上げにしていたのです。今回Freeの身となって、
新たな気持ちでPaper Robotに向き合うにあたり、まずここから始めてみようか
なと考えた次第です。
さてPR-4の時点では、摺り足歩行のPR-3タイプで試作していたのですが
PR-5で二足歩行も可能になった今PR-5タイプで作ってみることにしました。
当初は、紙を丸めてシャフトを作ってみたりしたのですが、紙の厚みによる
段差が最外周に残ってどうも軸が偏芯しているような動きになってしまいま
す。また木製の軸のように紙やすりで仕上げて摩擦係数を減らすことができ
ないので、どうしても抵抗が大きくなってしまいました。そこで軸の断面を丸
ではなく多角形にして軸と軸受けの接触面を減らして抵抗を少なくできな
いかと考えました。では軸の断面は何角形にすればよいかということですが
三角形や四角形では、作るのは簡単ですが強度が出せず、軸受との接触
点が少ない気がしました。そこで思いついたのが、六角形です。強度を出す
ために、六角形の断面を対角線で分割すると六個の正三角形から構成され
ているので、断面が正三角形の六角柱を六個貼り合せその外周を別の紙で
巻くようにして、シャフトとなる六角柱の各コーナーを仕上げる構成にしてみま
した。試してみたところこの方法だと対角の長さが5mmのそれなりの強度を持
ったシャフトが作れることがわかりました。ところが軸受の方はこれまでのよう
に紙を巻いたままのものだと、今度は軸受内面の紙の厚みの段差が六角柱
のコーナーに引っ掛かるような動きになってしまうことがわかりました。そこで
軸受の内面に段差が生じないように、最内面だけ別の紙として紙の端面を
突き合わせる構成で段差の生じない軸受を考えました。これで何とか紙のシ
ャフトでも動かせるレベルにはなりましたが、各シャフトに現合で軸受を作るこ
とになりこれも製作時間の倍増の一因になってしまいました。
まあそれはともかく、私的には動力のゴム以外、全てが紙製のThe Paper
Robot と呼べるペーパーロボットが作れたのではないかと考えています。
とりあえずシャフトも紙で作れますよというところでしょうか。